AUTONOMY FOR THE UNSTRUCTURED WORLD !
Fennec AI is building the first End-to-End Vision Policy designed for the chaos of the Global South. No HD Maps. No Geofencing. Just Vision.
STANDARD AVs BREAK HERE.

The Western Failure
Traditional autonomous stacks (Waymo, Cruise) rely on centimeter-perfect HD Maps and strict traffic rules. They fail instantly in the chaotic, unmapped roads of Algiers, Mumbai, or Cairo.
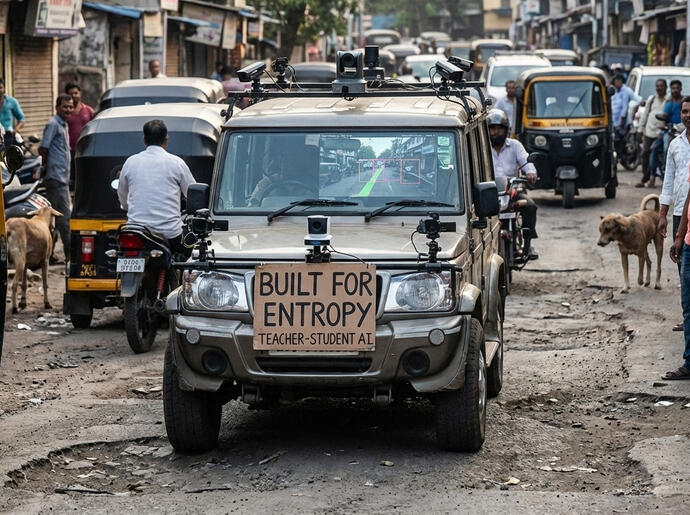
The Fennec Advantage
We are not building for perfect roads. We are building for Entropy. Our Teacher-Student pipeline leverages low-cost video data to train robust policies that navigate potholes, chaotic traffic, and unmapped infrastructure.
THE TEACHER-STUDENT PIPELINE.
THE TEACHER
Geometry
A sparse fleet of "Mules" equipped with LiDAR and HD Cameras captures geometric Ground Truth. This teaches the model exactly how far away the pothole is, pixel by pixel.
THE DRIVER
Behavior
We use large-scale Imitation Learning to clone the intuition of skilled local drivers. By observing thousands of hours of aggressive city driving, the model learns negotiation and assertiveness—traits impossible to hard-code.
THE STUDENT
Inference
The final step is Distillation. We fuse the geometric precision of the Teacher with the behavioral policy of the Driver into a lightweight Vision-Only Network that runs on standard edge hardware.
BUILT ON NVIDIA.
TRAINING: Foundation World Model optimization on NVIDIA Alpamayo architecture.
INFERENCE: Real-time edge deployment on NVIDIA Orin / Jetson.
SIMULATION: Edge-case synthesis using NVIDIA Omniverse.
© Fennec AI. All rights reserved - 2025